Конструкции приводов главного движения токарно-винторезных станков
Подавляющее большинство современных токарно-винторезных станков средних размеров в качестве привода главного движения имеет одно-, реже многоскоростной асинхронный электродвигатель трехфазного тока в сочетании со ступенчатой механической коробкой скоростей. Примером привода с коробкой скоростей, размещенной в шпиндельной бабке, может служить станок мод. 1К62, кинематическая схема которого показана на фиг. I,6, а развертка по валам коробки скоростей — на фиг. I, 7. Коробка скоростей получает движение через клиноременную передачу от односкоростного электродвигателя, расположенного в левой тумбе станины. На валу I размещена двусторонняя фрикционная муфта М1 для включения и выключения прямого и обратного вращения шпинделя. Изменение направления вращения вала II происходит вследствие передачи движения через блок паразитных колес (z = 24 и z = 36). Передвижением по валам II и III скользящих (передвижных) блоков Б1 и Б2 валу III сообщается шесть различных прямых скоростей и три обратных, более высоких. Управление блоками Б1 и Б2 осуществляется одной рукояткой 1 (фиг. I, 4), выведенной на лицевую сторону передней бабки. 
Движение от вала III может передаваться на шпиндель по двум кинематическим цепям: а) при сдвинутом влево двойном (двухвенцовом) блоке Б3 — через повышающую передачу (65 : 43) прямо на шпиндель, что дает шесть высших ступеней скорости вращения — от 630 до 2000 об/мин; б) при сдвинутом вправо блоке Б3 движение передается шпинделю через зубчатый перебор (блок Б4 — вал IV — блок Б5 — вал V), допускающий четыре различных включения с передаточными отношениями 1, 1:4, 1 : 4 и 1 : 16, два из которых совпадают. Через перебор шпиндель получает три более низких диапазона чисел оборотов (200÷630, 50÷160 и 12,5÷40 об/мин) по шесть ступеней в каждом. Одно число оборотов (630 об/мин) получается и при прямом включении, и через перебор; поэтому привод дает всего 23 различные скорости вращения шпинделя. Управление блоками Б3, Б4 и Б5 осуществляется также одной рукояткой 5 (фиг. I, 4). На валу III установлен тормоз, включение и выключение которого сблокировано с механизмом включения муфты М1. 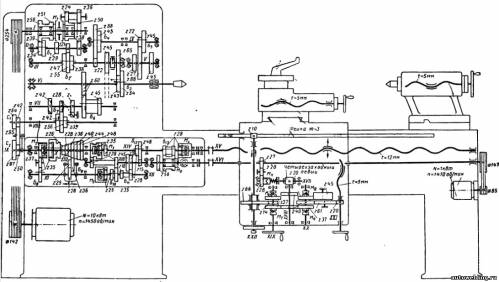
Просмотреть фотографию в реальном размере Фиг. I, 6. Кинематическая схема токарно-винторезного станка мод. 1К62. 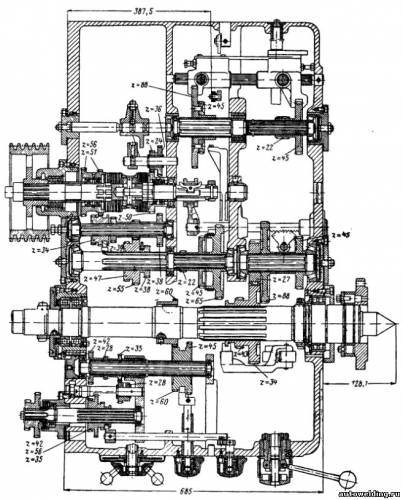
Просмотреть фотографию в реальном размере Фиг. I, 7. Развертка по валам коробки скоростей станка мод. 1К62. 
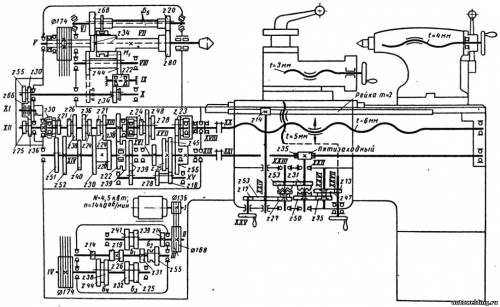
Просмотреть фотографию в реальном размере Фиг. I, 9. Кинематическая схема станка мод. 1А616. В станке мод. 1А616 (фиг. I, 8) коробка скоростей выполнена в отдельном корпусе, размещенном в левой тумбе (ножке) станины. Выходной вал коробки связан с входным валом шпиндельной бабки клиноременной передачей. Привод такого типа называется разделенным приводом. Он обеспечивает более плавное вращение шпинделя и применяется чаще в точных станках. Коробка скоростей получает движение через клиноременную передачу от отдельного двигателя, установленного на кронштейне с задней стороны левой тумбы станины. Натяжение ремней регулируется перемещением двигателя по плите, на которой он установлен. В результате переключений четырех блоков (фиг. I,9) Б1, Б2, Б3 и Б4 с помощью двух рукояток 1 (фиг. I, 8) выходной вал IV получает 12 различных скоростей вращения. Через клиноременную передачу движение передается на разгруженный шкив шпиндельной бабки, в которую встроен зубчатый перебор с передаточным отношением i = 1 : 8. Натяжение ремней производится перемещением в вертикальном направлении коробки скоростей. Движение на шпиндель может передаваться по двум кинематическим цепям: а) по короткой, непосредственно с вала V шкива при включенной муфте М1 и выключенном переборе Б5, шпиндель получает 12 высоких ступеней скорости вращения (от 90 до 2240 об/мин); б) через перебор Б5 при выключенной муфте М1 шпиндель получает 12 нижних ступеней скорости вращения (от 11,2 до 280 об/мин). Три скорости при включенном и выключенном переборе совпадают, поэтому привод дает только 21 (вместо 24) ступень скорости вращения шпинделя. Управление перебором Б5 и муфтой М1 сблокировано и осуществляется одной рукояткой 2 (фиг. I, 8). В приводе отсутствует главная, выключающая станок, фрикционная муфта, и включение, реверсирование и торможение шпинделя производятся электродвигателем. Для бесступенчатого изменения чисел оборотов шпинделя в токарно-винторезных станках средних и малых размеров находят применение фрикционные вариаторы. В приводе главного движения токарно-винторезного станка мод. 1М620 (фиг. I, 10) использован вариатор конструкции ЦНИИТМАШ (системы Светозарова) (В некоторых станках этой модели применялся вариатор с широким ремнем) в сочетании со ступенчатой коробкой скоростей, размещенной в шпиндельной бабке. Такая конструкция привода позволяет бесступенчато изменять числа оборотов шпинделя в пределах 12÷3000 об/мин. С помощью этого вариатора можно плавно, в пределах 750...3000 об/мин, изменять скорость вращения его выходного вала, а за счет переключений блоков Б1 Б2 и Б3 получить четыре бесступенчатых диапазона чисел оборотов шпинделя: 12...47, 47...190, 190...750 и 750...3000 об/мин. Вспомогательный двигатель N = 1 квт служит для управления вариатором. Муфтой М1 и скользящими шестернями Б4 и Б5 производится реверсирование шпинделя. 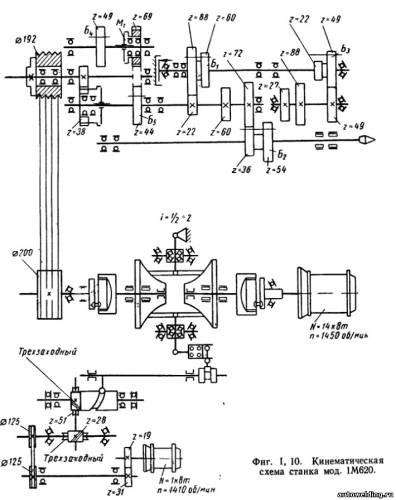
Просмотреть фотографию в реальном размере
В станках меньших размеров бесступенчатый привод может состоять из одного вариатора без переборной ступенчатой коробки скоростей. Тяжелые токарно-винторезные станки изготовляются, как правило, с бесступенчатым приводом скоростей шпинделя, что способствует повышению их производительности. Однако в тяжелых станках применяются не механические вариаторы, а электрические системы бесступенчатого изменения числа оборотов приводного электродвигателя в сочетании со ступенчатой механической коробкой скоростей станка. 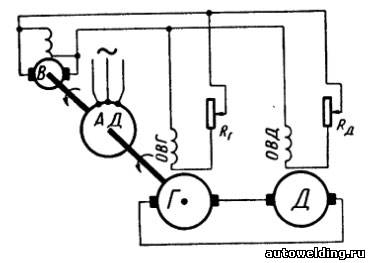
Фиг. I, 11. Система генератор—двигатель для бесступенчатого изменения чисел оборотов шпинделя. Наиболее распространенной электрической системой бесступенчатого изменения чисел оборотов в тяжелых станках является система генератор — двигатель (Г—Д), называемая иногда также системой Леонарда (фиг. I, 11). Она состоит из четырех электрических машин: асинхронного двигателя АД, который приводит во вращение генератор постоянного тока Г и маломощный генератор постоянного тока В и электродвигателя постоянного тока Д для привода станка. Скорость электродвигателя Д регулируется изменением сопротивлений Rг и Rд в цепях обмоток возбуждения ОВГ — генератора и ОВД — двигателя, питаемых постоянным током от возбудителя В. Диапазон регулирования такой системы может достигать 10—15. Следует иметь в виду, что машины АД и Г должны иметь мощность не меньшую, чем мощность приводного двигателя Д, поэтому затраты на систему Г—Д превышают затраты на один асинхронный двигатель переменного тока в 7—8 раз.
|